
Pwodwi yo


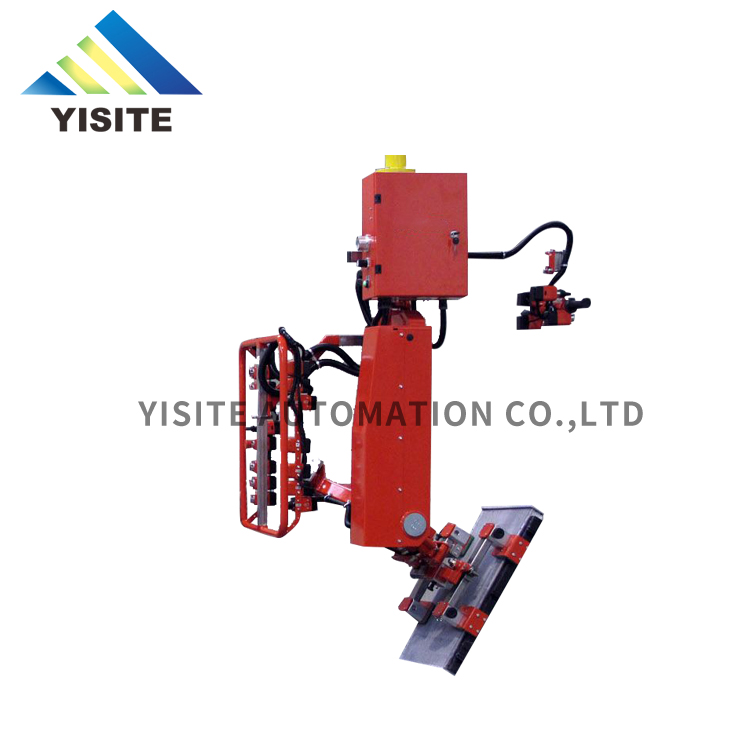
mobil manipilatè pneumatik bra difisil
Deskripsyon kout:
Manipilatè mobil chanm konpwesyon lè, se yon manipilatè pouvwa ki ka deplase nan nenpòt pozisyon pou deplase yon machin soti nan yon estasyon travay nan yon lòt.
Mobil pouvwa chanm konpwesyon lè robo bra ka ekonomize depans san yo pa achte plizyè machin pouvwa.
Akòz karakteristik ki pa gravite, entwisyon, operasyon pratik, sekirite ak efikasite segondè, manipilatè pouvwa mobil se lajman ki itilize nan retire materyèl loading, manyen frekans segondè, pwezante, asanble eleman ak lòt okazyon nan endistri modèn.

Li ka fasilman pwan nenpòt zafè soti nan yon kote, aplike aksyon pwosesis korespondan an, ak Lè sa a, mete l 'nan yon lòt kote selon kondisyon ki koresponn yo, reyalize operasyon ekonomize travay.

sou nou

Nou se yon pwofesyonèl manifakti ekipman automatisation personnalisé. Pwodwi nou yo gen ladan depalletizer, pick and place anbalaj machin, palletizer, aplikasyon entegrasyon robo, chaje ak dechaje manipulateur, katon fòme, sele katon, dispans palèt, anbalaj machin ak lòt solisyon automatisation pou liy pwodiksyon anbalaj back-end.
Zòn faktori nou an se apeprè 3,500 mèt kare. Ekip teknik debaz la gen yon mwayèn de 5-10 ane eksperyans nan automatisation mekanik, ki gen ladan 2 enjenyè konsepsyon mekanik. 1 enjenyè pwogramasyon, 8 travayè asanble, 4 moun debogaj apre lavant, ak 10 lòt travayè
Prensip nou an se "kliyan an premye, bon jan kalite premye, repitasyon an premye", nou toujou ede kliyan nou yo "ogmante kapasite pwodiksyon, diminye depans, ak amelyore kalite" nou fè efò yo vin yon founisè tèt nan endistri a automatisation machin.
Karakteristik pwodwi
1. Manipilatè pouvwa mobil gen fonksyon an sispansyon antye ak operasyon fasil;
2. Ede manipulateur a fabrike dapre prensip ergonomic, konfòtab ak pratik yo opere;
3. Konsepsyon estriktirèl manipilatè pouvwa mobil se modilè ak entegre kontwòl lè wout;
4. Manipilatè pouvwa mobil ede diminye depans travay pa 50%, entansite travayè pa 85%, ak amelyore efikasite pwodiksyon pa 50%;
5. Manipulateur pouvwa mobil pwepare selon chaj pwodwi ak orè operasyon an, nan diferan fòm pou satisfè bezwen diferan.


Karakteristik
Pri-efikas solisyon paletizasyon
Kontwòl rido limyè sekirite ki sitiye nan pwen sòti palèt konplè a
Maksimòm fleksibilite konsepsyon ki pèmèt ekipman an akomode pifò kondisyon operasyonèl ak layouts
Sistèm ka sipòte jiska 15 modèl anpile diferan
Konpozan estanda pou antretyen fasil







