
Pwodwi yo
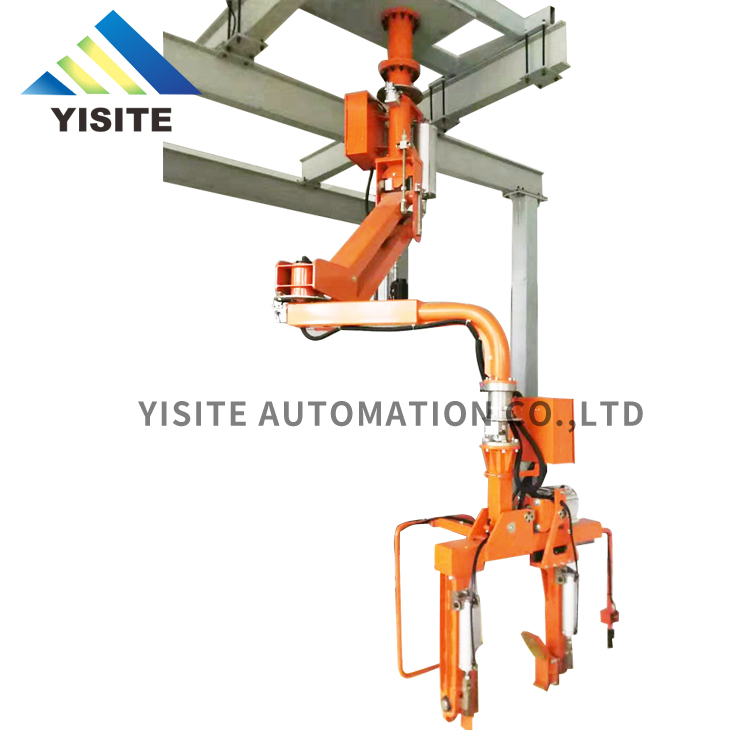


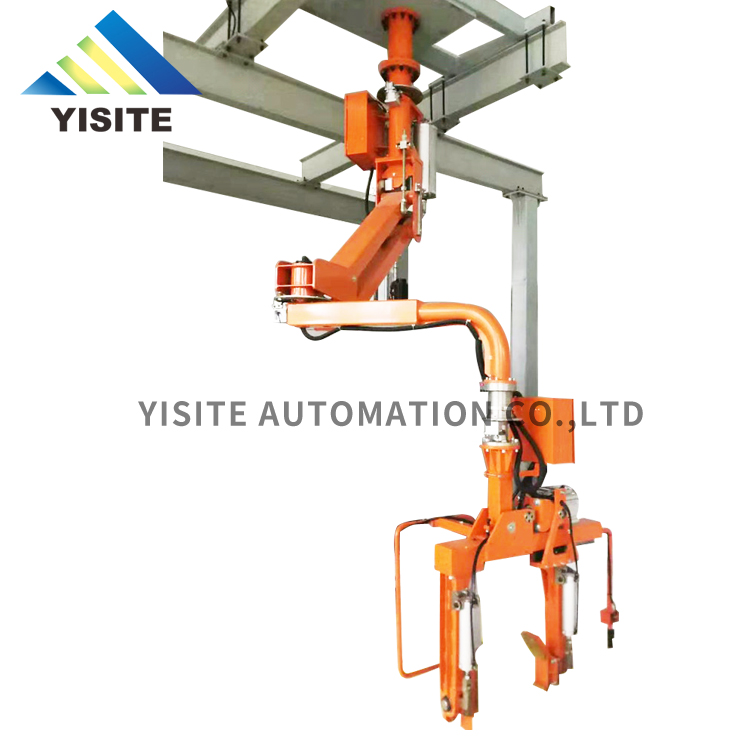
sispansyon Jib Cranes Manipulateur
Deskripsyon kout:
Manipulateur sispansyon rapèl la konsiste de baz enstalasyon, lame ak baton bra asye, fixture.bra prensipal la ka vire 360 degre, dezyèm baton bra a ka vire 270 degre pou reyalize seri a k ap travay nan pwoteksyon, ak wotasyon an ka ajoute a. mekanis fren.Li apwopriye pou manyen wo-frekans, pwezante, asanble eleman ak lòt okazyon.



sou nou

Nou se yon pwofesyonèl manifakti ekipman automatisation personnalisé. Pwodwi nou yo gen ladan depalletizer, pick and place anbalaj machin, palletizer, aplikasyon entegrasyon robo, chaje ak dechaje manipulateur, katon fòme, sele katon, dispans palèt, anbalaj machin ak lòt solisyon automatisation pou liy pwodiksyon anbalaj back-end.
Zòn faktori nou an se apeprè 3,500 mèt kare. Ekip teknik debaz la gen yon mwayèn de 5-10 ane eksperyans nan automatisation mekanik, ki gen ladan 2 enjenyè konsepsyon mekanik. 1 enjenyè pwogramasyon, 8 travayè asanble, 4 moun debogaj apre lavant, ak 10 lòt travayè
Prensip nou an se "kliyan an premye, bon jan kalite premye, repitasyon an premye", nou toujou ede kliyan nou yo "ogmante kapasite pwodiksyon, diminye depans, ak amelyore kalite" nou fè efò yo vin yon founisè tèt nan endistri a automatisation machin.
Karakteristik pwodwi
Lè yo detekte gode pou aspirasyon an oswa fen manipilatè a ak balanse presyon gaz la nan silenn lan, li ka otomatikman idantifye chay la sou bra mekanik la, epi otomatikman ajiste presyon lè a nan silenn lan atravè sikwi kontwòl lojik pneumatik la, pou reyalize a. objektif balans otomatik.Lè li ap travay, objè lou yo tankou yo te sispann nan lè a, sa ki ka evite kolizyon an nan debakadè pwodwi.Nan seri a k ap travay nan bra a mekanik, operatè a ka fasilman deplase li tounen, kite ak desann nan nenpòt ki. pozisyon, ak moun nan tèt li ka byen fasil opere.An menm tan an, kous la pneumatic tou gen fonksyon pwoteksyon chèn tankou anpeche pèt objè aksidan ak pwoteksyon pèt presyon.

Prensip k ap travay ak mòd manipilatè pouvwa sispansyon an:
Lè yo detekte gode pou aspirasyon an oswa fen manipilatè a ak balanse presyon gaz la nan silenn lan, li ka otomatikman idantifye chay la sou bra mekanik la, epi otomatikman ajiste presyon lè a nan silenn lan atravè sikwi kontwòl lojik pneumatik la, pou reyalize a. objektif balans otomatik.Lè w ap travay, objè lou yo tankou yo te sispann nan lè a, sa ki ka evite kolizyon an nan debakadè pwodwi.Nan seri a k ap travay nan bra a mekanik, operatè a ka fasilman deplase li tounen, kite ak desann nan nenpòt pozisyon. , ak moun nan tèt li ka byen fasil opere.An menm tan an, kous la pneumatic tou gen fonksyon pwoteksyon chèn tankou anpeche pèt objè aksidan ak pwoteksyon pèt presyon.
Karakteristik
Max chaj. 900 kg
Max reyon aksyon: 4500 mm
Vwayaj vètikal: 0,5m/min
Sistèm kontwòl: 2200 mm
Sistèm kontwòl: lè konplètman pneumatic
Pwovizyon pou: lè konprese (40 µm), pa gen grès
Travay presyon: 0.7 ÷ 0.8 Mpa
Tanperati travay: +0° a +45° C
bri:konsomasyon lè: 100 Nl ÷ 400 N pou chak sik
Wotasyon: arbr kolòn ak arbr aparèy 360 ° wotasyon kontinyèl, mitan arbr 300 ° wotasyon kontinyèl







