
Robo portique a konsiste de yon ankadreman kolòn, X-aks eleman, Y-aks eleman, Z-aks eleman, aparèy ak bwat kontwòl.
Li se yon ekipman endistriyèl totalman otomatik ki baze sou rektangilè X, Y, Z sistèm kowòdone ki genyen twa dimansyon, ki ka ajiste pozisyon pyès la oswa reyalize mouvman an trajectoire nan materyo a. Nwayo kontwòl li yo aplike atravè contrôleur endistriyèl.
Kontwolè a analize ak trete divès siyal opinyon, fè jijman ki lojik, Lè sa a, bay kòmandman ekzekisyon nan chak eleman pwodiksyon ranpli mouvman an jwenti ant aks X, Y, ak Z epi reyalize yon seri konplè nan pwosesis operasyon totalman otomatik.
Li se itilize nan asanble pwodwi ak transpò, sistèm CONVEYOR, ak sit travay san ekipe. Li ka itilize kòm yon ekipman periferik enpòtan pou depo tanporè ak lojistik epi yo ka fleksib matche ak ekipman lame pou itilize fasil. Endistri aplikasyon ki enplike nan: final asanble, sub-asanble, pwosesis, tès, debogaj ak transpò nan pwodwi ak konsa pitit gason.
Karakteristik pwodwi yo se ede kliyan rezoud pwoblèm ki genyen nan efikasite ki ba oswa gwo risk manyen nan divès kalite manyen materyèl, konsa tankou fasilman epi byen vit diminye risk manyen, ekonomize tan, efò, sove travay e menm ranplase travay.
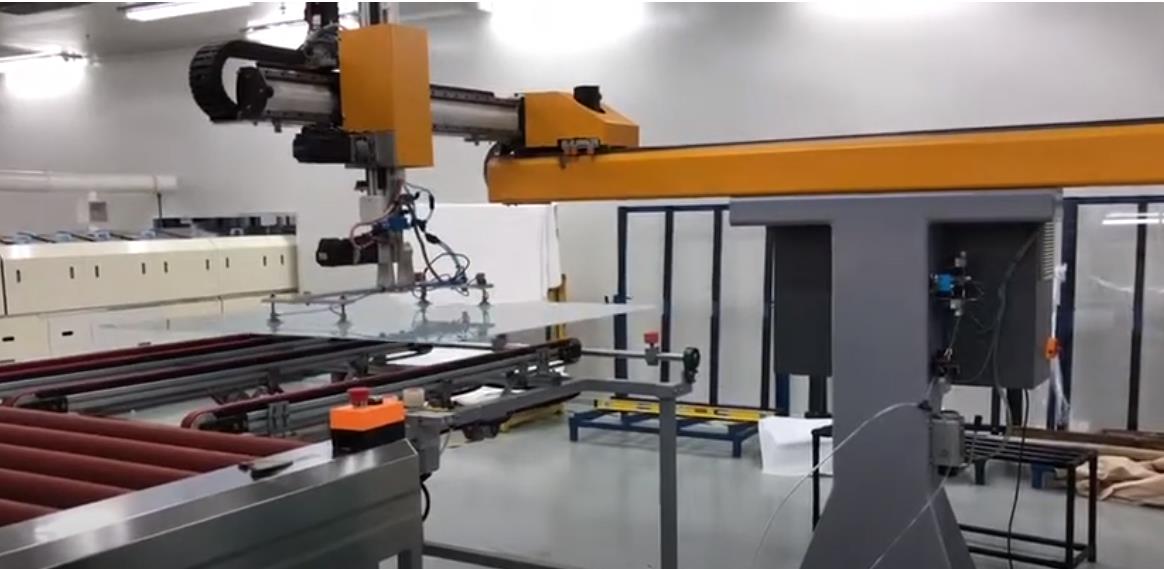
 Sa a manipilatè gantry bastengal aparèy manyen pou vè gen ladan kolòn ak travès kwa enstale sou kolòn yo. Travès yo kwa yo enstale ak ray glise. Ray glise yo enstale ak yon aparèy glisman transverse. Se aparèy glisman transverse a enstale ak yon aparèy glisman vètikal ak yon aparèy pou aspirasyon pneumatik. Li ka reyalize Mekanis transpò a deplase nan yon pwen fiks nan espas ki genyen twa dimansyon, souse glas la atravè ventouse a, Premye deplase lateralman sou aks X la, Lè sa a, baskile 90 degre nan pozisyon ki deziyen an, ak Lè sa a, deplase moute. ak desann sou aks Y la. Apre yo rive nan pozisyon an mete, lage glas la epi mete l sou etajè an vè. Estabilite estriktirèl tout aparèy la trè wo, sa ki amelyore anpil manyen. efikasite.
Sa a manipilatè gantry bastengal aparèy manyen pou vè gen ladan kolòn ak travès kwa enstale sou kolòn yo. Travès yo kwa yo enstale ak ray glise. Ray glise yo enstale ak yon aparèy glisman transverse. Se aparèy glisman transverse a enstale ak yon aparèy glisman vètikal ak yon aparèy pou aspirasyon pneumatik. Li ka reyalize Mekanis transpò a deplase nan yon pwen fiks nan espas ki genyen twa dimansyon, souse glas la atravè ventouse a, Premye deplase lateralman sou aks X la, Lè sa a, baskile 90 degre nan pozisyon ki deziyen an, ak Lè sa a, deplase moute. ak desann sou aks Y la. Apre yo rive nan pozisyon an mete, lage glas la epi mete l sou etajè an vè. Estabilite estriktirèl tout aparèy la trè wo, sa ki amelyore anpil manyen. efikasite.

Tan pòs: Mar-18-2024



