
Pwodwi yo

bwat carton portique oto palletizer
Deskripsyon kout:
bwat katon gantry oto palletizer pwodwi entwodiksyon: inite prensipal la nan palletizer a konpoze de yon chariot ki ka vwayaje pi devan ak dèyè, yon ankadreman, ak yon platfòm konpayi asirans ki ka leve leve, li desann. Ka gwosè a ak fixcture dwe Customized.
bwat katon gantry oto palletizer se ak yon konsepsyon espesyal nan priz pneumatic, presyon reglabl, ekipe ak valv tanpon presyon, se konsa ke aksyon an atrab ekipe ak mekanis endiksyon, ka otomatikman wè objè a, epi enfòme sant la kontwòl pou atrab objè a.

sou nou

Nou se yon pwofesyonèl manifakti ekipman automatisation personnalisé. Pwodwi nou yo gen ladan depalletizer, pick and place anbalaj machin, palletizer, aplikasyon entegrasyon robo, chaje ak dechaje manipulateur, katon fòme, sele katon, dispans palèt, anbalaj machin ak lòt solisyon automatisation pou liy pwodiksyon anbalaj back-end.
Zòn faktori nou an se apeprè 3,500 mèt kare. Ekip teknik debaz la gen yon mwayèn de 5-10 ane eksperyans nan automatisation mekanik, ki gen ladan 2 enjenyè konsepsyon mekanik. 1 enjenyè pwogramasyon, 8 travayè asanble, 4 moun debogaj apre lavant, ak 10 lòt travayè
Prensip nou an se "kliyan an premye, bon jan kalite premye, repitasyon an premye", nou toujou ede kliyan nou yo "ogmante kapasite pwodiksyon, diminye depans, ak amelyore kalite" nou fè efò yo vin yon founisè tèt nan endistri a automatisation machin.
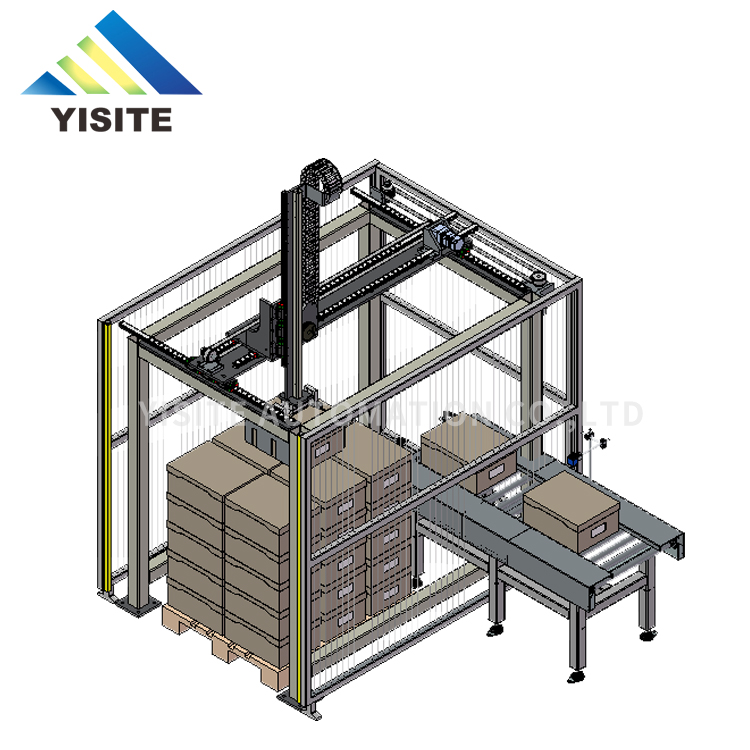
Truss XYZ totalman otomatik carton bos anpile manipulateur
1. Konpozisyon nan machin nan anpileur
Machin nan paletizasyon konpoze de ankadreman enstalasyon, sistèm pwezante, sistèm kondwi servo, sistèm kontwòl, kontwòl elektrik ak sistèm distribisyon, aparèy pwoteksyon sekirite, elatriye, ekipe ak sistèm pwezante otomatik manje. (Si ou vle sistèm ekipman pou pile otomatik)
2. anpile machin aliye etajè
Paske vitès mouvman an anpileur a trè vit, eta a kòmanse gen yon gwo enpak sou ankadreman an aliye.Ankadreman enstalasyon an dwe trè bon rijid asire operasyon an ki estab nan anpile a, kidonk nou te fèt estrikti nan ankadreman asye soude kòm ankadreman sipò a.
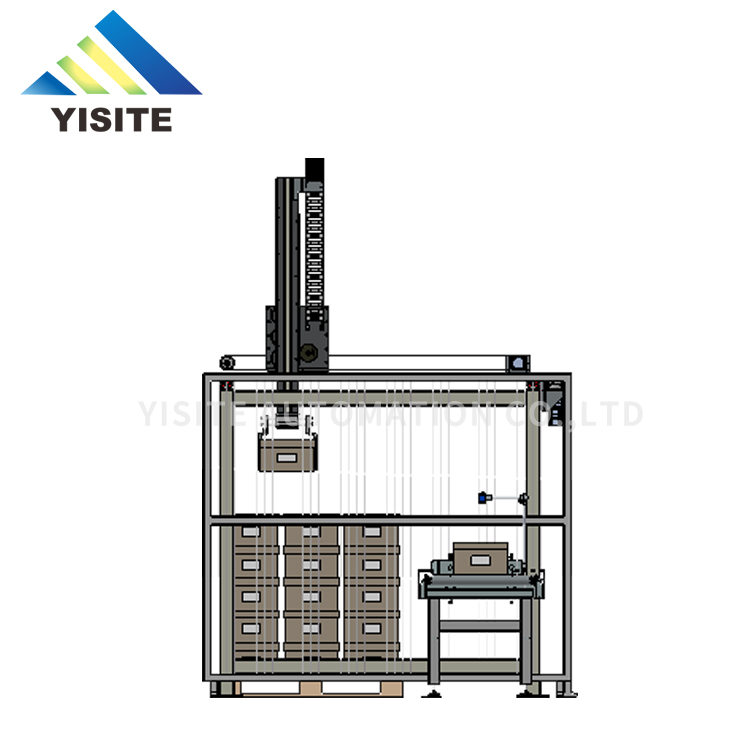
3. Stacker palletizer machin pwezante sistèm
Sistèm pwezante anpileur la se nwayo ekipman an antye, se pwodwi konpayi Yaskawa (Japon), vitès mouvman rapid, ak presizyon repetisyon an wo, X, Y, Z twa kowòdone yo chwazi pou transmisyon senti dan synchrone, kowòdone sèl. repete pwezante presizyon se 0.1mm, vitès mouvman liy vit: 1000 mm / s.The X aks se yon sistèm pwezante sèl ak yon longè sèl nan 3000mm ak yon span nan 1935mm. Transmetè a synchrone asire mouvman an synchrone nan de sistèm yo pwezante epi li se kondwi pa yon motè servo 1500W. Pou matche koupl la kondwi ak inèsi, gen yon redukteur segondè-presizyon planetè.
Aks Y la lè l sèvi avèk yon sistèm pwezante doub. Rezon an pou kisa inite pwezante a ak yon seksyon transvèsal gwo se sitou paske aks Y a se yon sipò doub-fen ak estrikti nan sispansyon presegondè. Si koup transvèsal chwazi a pa ase, estabilite mouvman robo a p ap garanti, epi robo a pral tranble lè w ap deplase nan gwo vitès. Yo itilize de inite pwezante kòt a kòt pou koupe aks Z nan mitan an ak balans. chaj la byen. Mòd enstalasyon sa a gen estabilite trè bon. De sistèm pwezante yo kondwi pa yon motè servo 1500W, ekipe ak yon redukteur planétè-wo presizyon pou matche koupl la kondwi ak inèsi.
Sistèm pwezante Z-aks la se fèm ak ki estab.Pwodwi a jeneralman gen kurseur a fiks ak mouvman an jeneral leve, li desann. Motè servo a bezwen amelyore objè a byen vit, ki bezwen simonte gwo gravite ak fòs akselerasyon, epi li bezwen pi gwo pouvwa. .Nan pratik, nou te chwazi yon motè sèrvo 2000W, ekipe ak yon redukteur planétè-wo presizyon. Aks A se aks wotasyon an.
4. Servo kondwi sistèm
Machin nan manipilatè anpile lè l sèvi avèk motè servo ak fonksyon dijital. Chak arbr motè ekipe ak yon motè servo ak yon redukteur, kat motè servo ak kat redukteur, ki gen ladan motè vètikal ak motè servo fèmen.
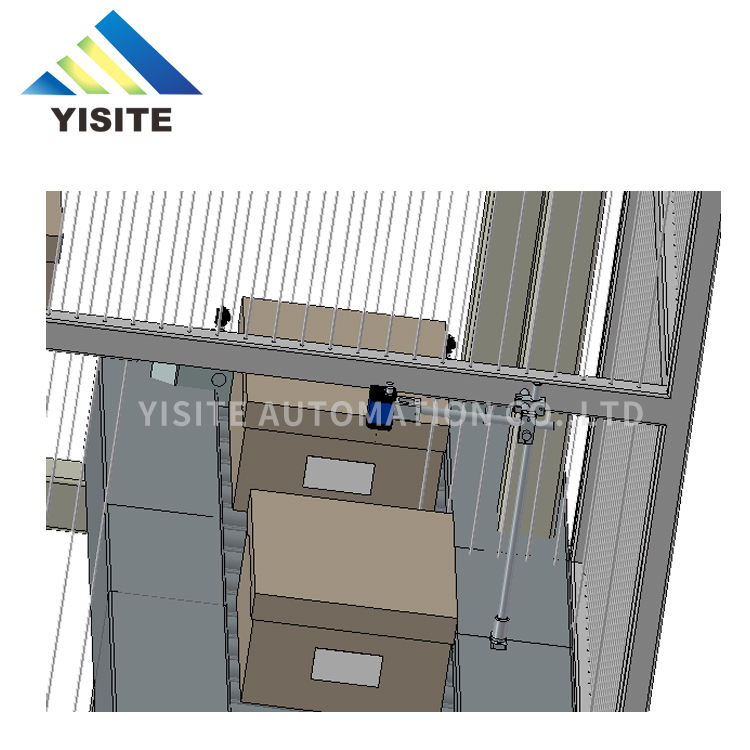
5. Stacker grip
Pile a ak yon konsepsyon espesyal nan priz pneumatic, presyon reglabl, ekipe ak valv tanpon presyon, se konsa ke aksyon an atrab ekipe ak mekanis endiksyon, ka otomatikman wè objè a, epi enfòme sant la kontwòl pou atrab objè a.
6, sistèm kontwòl
Sistèm kontwòl la konsiste de yon PLC gwo ak yon ekran manyen. Sistèm nan gen kapasite pwogramasyon pwisan. Avèk diferan modèl nan paletizasyon, sistèm nan ka prereglaj yon varyete de pwogram asosye, epi ranplase pwogram ki koresponn lan ka opere sou ekran an manyen.
7, aparèy sekirite
Machin nan gen yon èd memwa fay ak fonksyon alam, ak chak fay ka byen reflete kote espesifik la, fasil epi byen vit elimine defo, sitou ki gen ladan: fonksyon pwoteksyon kolizyon robo; enstalasyon pyès travay nan plas deteksyon; limyè pwoteksyon sekirite ekran.
Paramèt teknik
1. Modèl machin: YST-MD1500
2. Kapasite anpile: 200-500 bwat / H
3. ankadreman : SS41 (A3 enjeksyon plastik tretman) arbr S45C kote yo pote fe
4. pouvwa: CA, 3 faz, 380V, 9KW 50HZ
5. Konsomasyon lè: 500NL / MIN (itilizasyon lè: 5-6kg / cm2)
6. Dimansyon ekipman: (L) 3500mm (W) 2250mm (H) 2800mm (depann sou konsepsyon Layout aktyèl)
7. Pwa ekipman: 1,500 kg


Konfigirasyon avantaj prensipal la
1. Yaskawa mak servo motè
2. Taiwan mak vitès Larsen
3. Mitsubishi (Japon) PLC
4. Yo dwe itilize kontaktè ak switch nan Schneider
5. Capteur fotoelektrik Omron
6. Interface kontwòl ekspozisyon aksyon ak estati alam ak fonksyon alam
7. Yaskawa mak konvètisè frekans
8. ankadreman an ak panno bò yo fèt pa asye kabòn
9. Taiwan AirTac eleman Pneumatic
10. Italyen PIAB mak Sucker









